Жаропонижающие средства для детей назначаются педиатром. Но бывают ситуации неотложной помощи при лихорадке, когда ребенку нужно дать лекарство немедленно. Тогда родители берут на себя ответственность и применяют жаропонижающие препараты. Что разрешено давать детям грудного возраста? Чем можно сбить температуру у детей постарше? Какие лекарства самые безопасные?
Схема генератора и регулируемым коэффициентом заполнения импульсов, управляемого входным напряжением. Источник импульсного сигнала изменяемой скважности. Ограничение длительности импульсов (10+)
Коэффициент заполнения импульсного сигнала. Скважность - Генератор
Регулировка скважности
Для получения сигнала с управляемой скважностью удобно использовать ШИМ - контроллеры . Эти специализированные микросхемы как раз спроектированы, чтобы формировать сигналы со коэффициентом заполнения, зависящим от внешних условий.
Для примера рассмотрим схемы на интегральном ШИМ - контроллере 1156ЕУ3 или UC3823 .
Вашему вниманию подборки материалов: Резистор R1 - 10 кОм, подстроечный. С помощью него регулируется начальный уровень сигнала, при котором появятся импульсы минимальной длительности. Резистор R2 - 100 кОм Резистор R3 - 500 кОм, подстроечный. Он регулирует чувствительность, то есть увеличение этого резистора приводит к тому, что сигнал заданной амплитуды приводит к большему изменению коэффициента наполнения. Резистор R4, Конденсатор C1 - задают частоту выходного сигнала. Формула для расчета частоты в зависимости о параметров этих деталей . Резистор R5 - 100 кОм, подстроечный. Он регулирует максимально возможный коэффициент наполнения, а в схеме (A3), просто коэффициент заполнения. Конденсатор C1 - 0.1 мкФ. Готовое устройство, иллюстрирующее управление скважностью - Тренажер для снятия усталости глаз и спазма аккомодации . Ограничение максимального коэффициента заполненияВо многих случаях полезно ограничить максимальный коэффициент заполнения. Бывает нужно обеспечить, чтобы вне зависимости от управляющего сигнала коэффициент заполнения не превышал некоторую заданную величину. Это бывает необходимо, например, в повышающей, инвертирующей, обратноходовой, прямоходовой или пуш-пульной топологиях источников питания для того, чтобы магнитопровод дросселя или трансформатора между импульсами успел гарантированно размагнититься.
В схеме удалены все выводы и соединения, не имеющие отношения к нашей задаче ограничения скважности. Для примера выбрана микросхема 1156ЕУ3 или UC3823 . Без изменений описанный подход может применяться для микросхемы 1156ЕУ2 или UC3825 . Для других микросхем ШИМ может понадобиться подобрать номиналы деталей и учесть цоколевку этих микросхем. Принцип работы схемы следующий. Ножка 8 отвечает за мягкий старт. На нее внутри микросхемы подается ток 1 мкА. Этот ток заряжает внешний конденсатор. По мере роста напряжения на конденсаторе увеличивается максимально возможный коэффициент заполнения. Так обеспечивается постепенное увеличение ширины импульсов при запуске. Оно необходимо, так как при включении выходной конденсатор разряжен, и, если полагаться на обратную связь, то длительность импульсов будет максимальной, пока этот конденсатор не зарядится до рабочего напряжения. Это нежелательно, так как приводит к перегрузке при включении устройства. Подстроечный резистор и диод ограничивают максимально возможное напряжение, до которого может зарядиться конденсатор, а значит и максимально возможный коэффициент заполнения. При этом функция мягкого старта полностью сохраняется. Ширина импульсов по мере зарядки конденсатора постепенно нарастает от нуля до установленного значения. Далее рост коэффициента заполнения прекращается. Диод - любой маломощный, например, КД510 Подстроечный резистор - 100 кОм К сожалению в статьях периодически встречаются ошибки, они исправляются, статьи дополняются, развиваются, готовятся новые. |

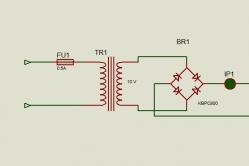
Широтно-импульсно модулированный сигнал очень часто применяется в электронике для передачи информации, регулировки мощности или формирования постоянного напряжения произвольного уровня. В этой статье описано устройство на операционном усилителе, размером 20х20мм из 15 элементов, которое генерирует ШИМ-сигнал.
ШИМ-сигнал (PWM) представляет собой последовательность импульсов, частота которых неизменна, а модулируется длительность импульсов. Большинство микроконтроллеров легко справляются с этой задачей, но что делать если нет желания программировать и использовать такое мощное средство для такой простой задачи? В этом случае можно использовать дискретные элементы.
Для начала необходимо сформировать последовательность пилообразных импульсов и подать ее на вход компаратора. На второй вход компаратора подается модулирующий сигнал, например, напряжение с переменного резистора. Если напряжение генератора выше напряжения на втором входе — на выходе напряжение близко к напряжению питания. Если напряжение генератора ниже — на выходе ноль.
На рисунке Uк — напряжение команды (постоянный уровень, заданный переменным резистором), Uген — напряжение генератора, UPWM — ШИМ-сигнал.
Схема
Все эти задачи можно легко выполнить при помощи двух операционных усилителей так как показано на схеме.

В схеме применена микросхема LM358N, которая использует однополярное питание и содержит два канала в одном корпусе SO8.
Печатная плата
Все элементы, кроме резистора R3, предназначены для поверхностного монтажа и располагаются на плате с минимальным размером. R3 расположен на обратной стороне платы. Генераторные схемы очень капризны с точки зрения трассировки печатных плат. Если изменить топологию платы нельзя гарантировать ее работоспособность. Первая версия платы генерировала пилообразное напряжение с очень низкой амплитудой и ее было невозможно использовать.

Сборка и работа схемы
Сама плата очень маленькая — 20х20 мм и легко изготавливается методом ЛУТ. Она лишь немного больше переменного резистора, изменяющего скважность сигнала.

Технические характеристики
- напряжение питания, 5-15В
- диапазон изменения скважности, от 1 до бесконечности
- рабочая частота, 500Гц
- потребляемый ток, не более, 2мА
Рабочая частота определяется конденсатором C1. Для снижения частоты можно увеличить его емкость и наоборот.
Список элементов
- ИМС LM358N в корпусе SO8 (DA1), 1 шт.
- Резисторы 20кОм в корпусе 0805 (R1,R2,R4-R6), 5 шт.
- Резисторы 10кОм в корпусе 0805 (R7,R8), 2 шт.
- Любой переменный резистор с шагом выводов 5мм и сопротивлением 50кОм
- Конденсаторы 0,1мкФ в корпусе 0805 (C1,C2,C4), 3шт.
- Конденсатор танталовый 47мкФ, 16В, типоразмера С, T491C476K016AT (C3), 1шт.
Видео работы
Работает плата достаточно стабильно. На видео видно, как меняется яркость светодиода. Неудобство только в том, что используется лишь половина диапазона резистора R3. То есть в первой и последней четверти положения вала напряжение остается без изменения.
ШИМ или PWM (широтно-импульсная модуляция, по-английски pulse-width modulation) – это способ управления подачей мощности к нагрузке. Управление заключается в изменении длительности импульса при постоянной частоте следования импульсов. Широтно-импульсная модуляция бывает аналоговой, цифровой, двоичной и троичной.
Применение широтно-импульсной модуляции позволяет повысить КПД электрических преобразователей, особенно это касается импульсных преобразователей, составляющих сегодня основу вторичных источников питания различных электронных аппаратов. Обратноходовые и прямоходовые однотактные, двухтактные и полумостовые, а также мостовые импульсные преобразователи управляются сегодня с участием ШИМ, касается это и резонансных преобразователей.
Широтно-импульсная модуляция позволяет регулировать яркость подсветки жидкокристаллических дисплеев сотовых телефонов, смартфонов, ноутбуков. ШИМ реализована в , в автомобильных инверторах, в зарядных устройствах и т. д. Любое зарядное устройство сегодня использует при своей работе ШИМ.
В качестве коммутационных элементов, в современных высокочастотных преобразователях, применяются биполярные и полевые транзисторы, работающие в ключевом режиме. Это значит, что часть периода транзистор полностью открыт, а часть периода - полностью закрыт.
И так как в переходных состояниях, длящихся лишь десятки наносекунд, выделяемая на ключе мощность мала, по сравнению с коммутируемой мощностью, то средняя мощность, выделяемая в виде тепла на ключе, в итоге оказывается незначительной. При этом в замкнутом состоянии сопротивление транзистора как ключа очень невелико, и падение на нем напряжения приближается к нулю.
В разомкнутом же состоянии проводимость транзистора близка к нулю, и ток через него практически не течет. Это позволяет создавать компактные преобразователи с высокой эффективностью, то есть с небольшими тепловыми потерями. А резонансные преобразователи с переключением в нуле тока ZCS (zero-current-switching) позволяют свести эти потери к минимуму.

В ШИМ-генераторах аналогового типа, управляющий сигнал формируется аналоговым компаратором, когда на инвертирующий вход компаратора, например, подается треугольный или пилообразный сигнал, а на неинвертирующий - модулирующий непрерывный сигнал.
Выходные импульсы получаются , частота их следования равна частоте пилы (или сигнала треугольной формы), а длительность положительной части импульса связана с временем, в течение которого уровень модулирующего постоянного сигнала, подаваемого на неинвертирующий вход компаратора, оказывается выше уровня сигнала пилы, который подается на инвертирующий вход. Когда напряжение пилы выше модулирующего сигнала - на выходе будет отрицательная часть импульса.

Если же пила подается на неинвертирующий вход компаратора, а модулирующий сигнал - на инвертирующий, то выходные импульсы прямоугольной формы будут иметь положительное значение тогда, когда напряжение пилы выше значения модулирующего сигнала, поданного на инвертирующий вход, а отрицательное - когда напряжение пилы ниже сигнала модулирующего. Пример аналогового формирования ШИМ - микросхема TL494, широко применяющаяся сегодня при построении импульсных блоков питания.

Цифровая ШИМ используются в двоичной цифровой технике. Выходные импульсы также принимают только одно из двух значений (включено или выключено), и средний уровень на выходе приближается к желаемому. Здесь пилообразный сигнал получается благодаря использованию N-битного счетчика.
Цифровые устройства с ШИМ работают также на постоянной частоте, обязательно превосходящей время реакции управляемого устройства, этот подход называется передискретизацией. Между фронтами тактовых импульсов, выход цифрового ШИМ остается стабильным, или на высоком, или на низком уровне, в зависимости от текущего состояния выхода цифрового компаратора, который сравнивает уровни сигналов на счетчике и приближаемый цифровой.
Выход тактуется как последовательность импульсов с состояниями 1 и 0, каждый такт состояние может сменяться или не сменяться на противоположное. Частота импульсов пропорциональна уровню приближаемого сигнала, а единицы, следующие друг за другом могут сформировать один более широкий, более продолжительный импульс.
Получаемые импульсы переменной ширины будут кратны периоду тактования, а частота будет равна 1/2NT, где T – период тактования, N – количество тактов. Здесь достижима более низкая частота по отношению к частоте тактования. Описанная схема цифровой генерации - это однобитная или двухуровневая ШИМ, импульсно-кодированная модуляция ИКМ.
Эта двухуровневая импульсно-кодированная модуляция представляет собой по сути серию импульсов с частотой 1/T, и шириной Т или 0. Для усреднения за больший промежуток времени применяется передискретизация. Высокого качества ШИМ позволяет достичь однобитная импульсно-плотностная модуляция (pulse-density-modulation), называемая также импульсно-частотной модуляцией.
При цифровой широтно-импульсной модуляции прямоугольные подимпульсы, которыми оказывается заполнен период, могут приходиться на любое место в периоде, и тогда на среднем за период значении сигнала сказывается только их количество. Так, если разделить период на 8 частей, то комбинации импульсов 11001100, 11110000, 11000101, 10101010 и т. д. дадут одинаковое среднее значение за период, тем не менее, отдельно стоящие единицы утяжеляют режим работы ключевого транзистора.

Корифеи электроники, повествуя о ШИМ, приводят такую аналогию с механикой. Если при помощи двигателя вращать тяжелый маховик, то поскольку двигатель может быть либо включен, либо выключен, то и маховик будет либо раскручиваться и продолжать вращаться, либо станет останавливаться из-за трения, когда двигатель выключен.
Но если двигатель включать на несколько секунд в минуту, то вращение маховика будет поддерживаться, благодаря инерции, на некоторой скорости. И чем дольше продолжительность включения двигателя, тем до более высокой скорости раскрутится маховик. Так и с ШИМ, на выход приходит сигнал включений и выключений (0 и 1), и в результате достигается среднее значение. Проинтегрировав напряжение импульсов по времени, получим площадь под импульсами, и эффект на рабочем органе будет тождественен работе при среднем значении напряжения.
Так работают преобразователи, где переключения происходят тысячи раз в секунду, и частоты достигают единиц мегагерц. Широко распространены специальные ШИМ-контроллеры, служащие для управления балластами энергосберегающих ламп, блоками питания, и т. д.

Отношение полной длительности периода импульса ко времени включения (положительной части импульса) называется скважностью импульса. Так, если время включения составляет 10 мкс, а период длится 100 мкс, то при частоте в 10 кГц, скважность будет равна 10, и пишут, что S = 10. Величина обратная скважности называется коэффициентом заполнения импульса, по-английски Duty cycle, или сокращенно DC.
Так, для приведенного примера DC = 0.1, поскольку 10/100 = 0.1. При широтно-импульсной модуляции, регулируя скважность импульса, то есть варьируя DC, добиваются требуемого среднего значения на выходе электронного или другого электротехнического устройства, например двигателя.
На Рисунке 1 ширина импульса на выводе 3 модулируется управляющим напряжением V CONTROL , приложенным к выводу 5. Лабораторные измерения схемы были выполнены при напряжении питания 5 В. На Рисунках 2…5 показаны выходные ШИМ сигналы при трех различных управляющих напряжениях: 1 В, 2 В и 4 В. Конденсатор C1 заряжается напряжением источника питания V SUPPLY до уровня V CONTROL и разряжается от V CONTROL /2 до уровня земли. При отсутствии внешнего управляющего напряжения напряжение V CONTROL составляет 2/3 от V SUPPLY .
Представленные осциллограммы иллюстрируют влияние управляющего напряжения, приложенного к выводу 5, на изменения пороговых напряжений двух внутренних компараторов. В отсутствие управляющего напряжения (Рисунок 4) пороги заряда и разряда C1 определяются внутренней структурой таймера и составляют 1/3 и 2/3 от напряжения питания. Этими порогами, равноудаленными от напряжения питания и земли, устанавливается коэффициент заполнения равный 50%. При изменении управляющего напряжения изменяется время заряда C1, за которое напряжение на конденсаторе должно достичь V CONTROL , и время разряда, в течение которого напряжение спадает до V CONTROL /2. Этот процесс приводит к модуляции ширины выходного импульса.
Время заряда определяется формулой

R = R1,
C =C1.
Время разряда можно вычислить из выражения

Схема 2: генератор ШИМ с компаратором
Компаратор MAX998 включается согласно Рисунку 6.
 |
|
| Рисунок 6. | ШИМ генератор и компаратор. |
Ширина выходного импульса модулируется под управлением напряжения, приложенного к R1. При напряжении питания 5 В были проведены лабораторные измерения, результаты которых представлены на Рисунках 7…9, демонстрирующих формы выходных сигналов ШИМ при управляющем напряжении, равном 1 В, 2 В и 4 В.
Приложенное к микросхеме MAX998 управляющее напряжение устанавливает пороговые напряжения, определяющие моменты начала заряда и разряда C1. Верхний порог равен

а нижнее пороговое напряжение равно V CONTROL /2.
Время заряда можно найти из формулы

Время разряда описывается выражением
R = R1,
C =C1.
Варианты ШИМ генераторов на двух микросхемах
Необходимо отметить, что управляющее напряжение в обеих схемах изменяет не только длительность импульсов, но и их частоту. Добавив в каждую из схем по одному компаратору, можно зафиксировать частоту выходных сигналов.
В Схеме 1 пилообразное напряжение с вывода 6 необходимо подать на вход второго компаратора. Это напряжение будет задавать коэффициент заполнения выходных импульсов постоянной частоты. Аналогично, в Схеме 2 на второй компаратор подается пилообразное напряжение с инвертирующего входа MAX998.
Хорошее определение широтно-импульсной модуляции (ШИМ) заключается в самом его названии. Это означает модуляция (изменение) ширины импульса (не частоты). Чтобы лучше понять что такое ШИМ , давайте сначала посмотрим некоторые основные моменты.
Микроконтроллеры представляют собой интеллектуальные цифровые компоненты которые работают на основе бинарных сигналов. Лучшее представление бинарного сигнала – меандр (сигнал имеющий прямоугольную форму). Следующая схема объясняет основные термины, связанные с прямоугольным сигналом.
В ШИМ-сигнале время (период), и следовательно частота является всегда постоянной величиной. Изменяется только время включения и время выключения импульса (скважность). Используя данный метод модуляции, мы можем получить необходимое нам напряжение.
Единственное различие между меандром и ШИМ-сигналом заключается в том, что у меандра время включения и отключения равны и постоянны (50% скважность), в то время как ШИМ-сигнал имеет переменную скважность.
Меандр может рассматриваться как частный случай ШИМ сигнала, который имеет 50% рабочий цикл (период включения = период отключения).
Рассмотрим на примере использование ШИМ
Допустим, мы имеим напряжение питания 50 вольт и нам необходимо запитать какую-либо нагрузку, работающую от 40 вольт. В этом случае хороший способ получения 40В из 50В — это использовать так называемый понижающий чоппер (прерыватель).
ШИМ сигнал, генерируемый чеппером, поступает на силовой узел схемы (тиристор, полевой транзистор), который в свою очередь управляет нагрузкой. Этот ШИМ-сигнал может легко генерироваться микроконтроллером, имеющим таймер.
Требования к ШИМ-сигналу для получения с помощью тиристора 40В из 50В: подача питания, на время = 400мс и выключение на время = 100мс (с учетом периода ШИМ сигнала равного 500 мс).
В общих словах это можно легко объяснить следующим образом: в основном, тиристор работает как переключатель. Нагрузка получает напряжение питания от источника через тиристор. Когда тиристор находится в выключенном состоянии, нагрузка не подключена к источнику, а когда тиристор находится в открытом состоянии, нагрузка подключается к источнику.
Этот процесс включения и выключения тиристора осуществляется посредством ШИМ сигнала.
Соотношение периода ШИМ-сигнала к его длительности называется скважность сигнала, а обратная к скважности величина именуется коэффициентом заполнения.
Если коэффициент заполнения равен 100, то в этом случае у нас сигнал постоянный.
Таким образом, скважность импульсов (рабочий цикл) может быть вычислен с использованием следующей формулы:
![]()
Используя выше приведенные формулы, мы можем рассчитать время включения тиристора для получения необходимого нам напряжения.
Умножая скважность импульсов на 100, мы можем представить это в процентном соотношении. Таким образом, процент скважность импульсов прямо пропорционален величине напряжения от исходного. В приведенном выше примере, если мы хотим получить 40 вольт от 50 вольт источника питания, то это может быть достигнуто путем генерации сигнала со скважность 80%. Поскольку 80% из 50 вместо 40.
Для закрепления материала, решим следующую задачу:
- рассчитаем длительность включения и выключения сигнала, имеющего частоту 50 Гц и скважность 60%.
![]()
Полученный ШИМ волны будет иметь следующий вид:
![]()
Один из лучших примеров применения широтно-импульсной модуляции является использование ШИМ для регулировки скорости двигателя или яркости свечения светодиода.
Этот прием изменения ширины импульса, чтобы получить необходимый рабочий цикл называется “широтно-импульсная модуляция”.