Жаропонижающие средства для детей назначаются педиатром. Но бывают ситуации неотложной помощи при лихорадке, когда ребенку нужно дать лекарство немедленно. Тогда родители берут на себя ответственность и применяют жаропонижающие препараты. Что разрешено давать детям грудного возраста? Чем можно сбить температуру у детей постарше? Какие лекарства самые безопасные?
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид

ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.
Stanley: самоуправляемое транспортное средство

Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул
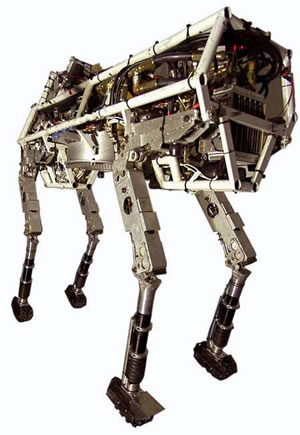
БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.

QRIO: танцующий робот
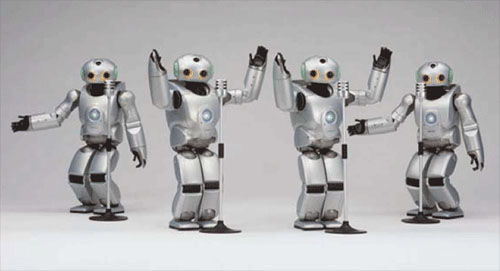
QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
Торговля советниками освобождает трейдера от рутинной работы, связанной с анализом рынка и принятием торговых решений. Но сложность состоит в том, что найти качественный советник непросто. Сегодня я хочу предложить вам такой – это робот скальпер Эйнштейн. Он показывает достаточно высокие результаты торговли. Авторство принадлежит зарубежному трейдеру. Как работает этот советник. Алгоритм достаточно простой. В него встроен канальный индикатор и сделки открываются соответственно от границ каналов. Но для того, чтобы риски были минимальными, используется также фильтр. Им является индикатор волатильности. Это позволяет роботу приносить счёту трейдера стабильную прибыль при небольших рисках. Просадка, как правило, на превышает 20-ти процентов, что вполне допустимо.
Робот скальпер Эйнштейн позволяет торговать круглосуточно. Поэтому наилучшим вариантом будет размещение его на VPS сервере.
Оптимальные инструменты для торговли – это пары евро/доллар и фунт/доллар.
Торговля ведётся на минутном графике.
Размер сделки на каждые 100 долларов депозита – 0,01 лота.
Устанавливается советник в МТ4 по обычной схеме. Только хочу предупредить, что кроме файла самого робота надо установить и файл библиотеки DLL. Его надо скопировать и вставить в папку торгового терминала Libraries. Ссылки для скачивания робота и библиотеки я дам в конце этой статьи.
Настройки робота Эйнштейн
Выглядят они так:
Как видите, параметров немного. А трейдера могут заинтересовать лишь некоторые из них. Прежде всего, это параметр Fixed-Lot. С его помощью можно указать роботу объём торговых позиций, которые он будет открывать.
Можно также позволить советнику самому рассчитывать размер лота. Для этого надо активировать параметр Auto-MM.
Следующий параметр – это Max-Spread. Он может запретить роботу открывать торговые ордера, если размер спреда у брокера превысит указанное значение. Кстати, это важный вопрос, поскольку советник фиксирует совсем небольшую прибыль в каждой сделке.
Можно также указать роботу при каком количестве убыточных сделок подряд следует остановить торговлю. Для этого есть параметр Number-of-try.
Для защиты от проскальзывания можно воспользоваться параметром Slippag. Робот прекратит открывать ордера, если размер проскальзывания превысит указанный в настройках.
Ну и последний параметр – это Magic-Number. Он нужен в том случае, если трейдер торгует не только этим советником, но и другими способами. Указав в этом параметре какие-либо цифры, можно выделить в истории сделки, открытые роботом Эйнштейн.
Тестирование советника в демо торговле является обязательным требованием. Кроме проверки заявленной эффективности, можно также попробовать его работу с другими настройками.
Скачать робот скальпер Эйнштейн:
А библиотеку, в виду большого размера файла, скачать можно по этой ссылке.





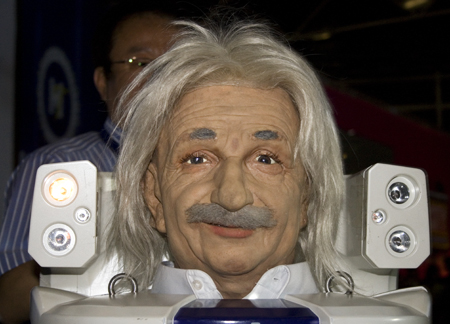
Робот способен даже к асимметричным выражениям лица
«Лица» человекоподобных роботов понемногу все больше становятся похожими на наши: их «лицевые мускулы» постоянно совершенствуются и миниатюризируются. Неудивительно, что исследователи из Machine Perception Laboratory задались вопросом о том, как эффективно научить роботов выражать с помощью своих «лиц» понятные нам эмоции, и делать это максимально реалистично.
Созданный ими робот Einstein выглядит весьма похоже на бюст великого ученого. В нем скрыты 30 «лицевых мускулов», миниатюрных сервоприводов, связанных с поверхностью «лица». Как научить его пользоваться ими? Можно усадить высококвалифицированного специалиста, а то и нескольких, чтобы они составили полный набор нужных эмоций, подобрали соответствующие им комбинации задействованных «мускулов» и запрограммировали каждую. Но можно поступить и умнее.
У человеческих детей этот процесс не вызывает никаких трудностей. Они учатся выражению эмоций через наблюдение за окружающими людьми и подражание им (тем же путем усваивается и масса другой информации и навыков). Поначалу ребенок «выдает» выражения лица случайным образом, однако определенные из них в соответствующих ситуациях получают подкрепление и начинает проявляться куда чаще. Именно такой подход и решили реализовать ученые в роботе Einstein. Взгляните, чему он уже научился.
Для начала Einstein’а оснастили специальной программой для анализа выражения лиц. Затем его научили «вертеться перед зеркалом»: робот распознавал собственную мимику и сделал выводы о том, как конкретные движения определенных сервоприводов связаны с тем или иным выражением лица. Это позволило ему придавать собственному лицу новые выражения, которые изначально не были заложен в него программой.
При этом ученые наблюдали удивительно интересный момент. Один из авторов рассказывает: «В ходе эксперимента один сервопривод сгорел, и некоторое время мы продолжали без него. И тут робот сам научился компенсировать отсутствие этого элемента, используя вместо него комбинацию соседних приводов».
Так что — несмотря на то, что главной задачей разработчиков была и остается инженерная проблема, создание простой, самообучающейся и реалистичной модели мимики — проект может рассказать многое и о том, как работает мимика и у человека.
Читайте, кстати, о кошмарном роботе, который своим лицом владеет в совершенстве, умея лицемерно притворяться кем угодно: «
) построили торс и голову с лицом Альберта Эйнштейна — Einstein robot. Главная изюминка проекта: машина умеет менять выражение лица и способна обучаться новой мимике, наблюдая за собой.
Напомним, первым роботом с лицом Эйнштейна был Albert Hubo , основанный на первом корейском андроиде . Однако если у корейцев главным достижением был человекоподобный механизм как таковой, а «голову великого физика» к нему прикрутили больше для рекламы, то новый бот из США продвинулся гораздо дальше именно по части лицевой экспрессии. Собственно, кроме головы у нового робота практически ничего и нет.
Зато у американского аппарата имеется около 30 лицевых мышц, роль которых выполняют струны, идущие к маленьким электромоторчикам. В давешнем японском проекте , изучавшем разные аспекты работы человеческой мимики при помощи робототехнического устройства, помнится, инженеры смогли сделать подвижными только 17 контрольных точек лица.
Самообучение привело робота к созданию ряда новых для него выражений, изначально не заложенных авторами машины, утверждают учёные из Сан-Диего (фото UCSD).
Конечно, даже с тремя десятками переменных параметров калифорнийскому «Эйнштейну» ещё далеко до настоящего человеческого лица в способности выражать эмоции. Но это большой шаг вперёд на фоне других проектов по улучшению невербальной составляющей человеко-машинного общения. Симпатичная Nexi , реалистичная девушка-андроид и робот Филип Дик тут отстают.
По словам исследователей, ни одна научная группа до сих пор не использовала машинное обучение, для того чтобы робот мог выдавать реалистичную мимику.
Сначала авторы проекта заставили робота выдавать небольшие случайные движения, напоминающие те, что совершают младенцы, дабы научиться контролировать своё тело. А для обратной связи компьютерщики поставили перед лицом «Эйнштейна» зеркало (роботу, понятно, подарили зрение).
«Эйнштейна» снабдили программой, распознающей человеческую мимику. Таким способом машина могла самостоятельно составить базовую карту связи тех или иных движений моторов и получающихся выражений лица. Затем «Эйнштейн» обучился новой мимике — от отражения гнева до демонстрации грусти.

Участники проекта (Хавьер Мовеллан (Javier Movellan), У Тинфань (Tingfan Wu) и другие) намерены нарастить точность показа тех или иных физиономий и поднять «интеллект» управляющей программы (фото UCSD).
В изменении выражения лица у настоящего человека задействовано гораздо больше мышц, да и картина взаимодействия мускулов и кожи — сложнее, чем у головы андроида. Тем не менее учёные полагают, что «Эйнштейн» поможет им разобраться с тем, как ребёнок учится мимике.
Проект ещё будет развиваться. Сейчас обучение «Эйнштейна» требует ручного вмешательства (выполнения тонких настроек некоторых моторчиков), и всё равно результат порой больше ужасает, чем воодушевляет.